デジタル式定電流放電器の制作(その11)EBL製充電池の評価 [PIC]
ポケコンを弄っていると電池を充電する間使えなくなって不便なので予備用の充電池を購入しました。
今までの経験から電池は日本製と決めていたのですが、先日 YouTube で見た充電池の比較テストで以外にも EBL 製の結果が良かったのです。今回は安さの誘惑に耐えられず EBL 製のものを購入しましたw
YouTube で見た評価をそのまま信じてしまうのもあれなので、自作の放電器ネタは久々なのですが今回購入した EBL 製電池の評価を行ってみました。放電電流は 0.5A で放電終了電圧を 1.0V に設定しました。
また、以前作成した単4電池用のアダプタはきつかったので今回作り直しました。
下図が、今回作成した単4電池用アダプタのCAD画面です。回転したものを切り取っているだけなので設計は簡単ですね。穴の部分に半田付け作業時に貯めていた抵抗のリードを通して電池のマイナス極が電池ホルダのマイナス側に導通するようにします。
下の写真はかなり前に開発したデジタル式放電器です。右側に映っているのは単4電池を装着するためのアダプタです。
下の写真は放電中の様子です。スイッチ操作で表示する電池を選択(または全チャンネル表示)が可能です。
測定結果を下表に示します。この電池の仕様容量は 1100mAh ですが測定結果は仕様容量の70%弱と言ったところです。
通常は回数を重ねるごとに眠っていた電池が活性化してくるので容量が増えるのですが、今回は3回目の測定値が電池によらず低めになりました。これは充電後に直ぐに測定したためかもしれません。1回目は購入直後に追充電していますし、2回目はすぐに放電できなかったので満充電後に時間を置いてから放電前に追充電しています。
以前測定した百均のニッケル水素電池(VOLCANO)は数回の充放電でほぼ仕様容量になったのでお勧めかもしれません。
それぞれの電池の放電特性の詳細を下図に示します。
下図は1回目(購入後に直ぐに満充電した状態から放電試験実施)です。
2回目の放電で原因は不明なのですが No.2 の放電特性が暴れていますね。No.4 も後半に少し暴れています。
3回目は上記の様に早めに放電してしまいました。電圧特性を見比べると一定値の時間が短い(だらだら下がっている)のでもしかしたら既に劣化が進んでいるのかもしれません。
★追記 2023/07/20
従来使用していた TOSHIBA 製の4本の白い単4電池の容量も測定してみました。
仕様容量が 750mAh で測定値の平均が 766mAh なので数年前に購入した(使用頻度は高くない)にもかかわらず、仕様値以上の結果でした。流石に日本製ですね。
放電時の電圧/電流特性が下図になります。購入してから数年経ちますがバラツキも少ないですね。
[ 前へ ] 連載記事 [ 次へ ]
今までの経験から電池は日本製と決めていたのですが、先日 YouTube で見た充電池の比較テストで以外にも EBL 製の結果が良かったのです。今回は安さの誘惑に耐えられず EBL 製のものを購入しましたw
| 購入したEBL製ニッケル水素電池 |
|
|
YouTube で見た評価をそのまま信じてしまうのもあれなので、自作の放電器ネタは久々なのですが今回購入した EBL 製電池の評価を行ってみました。放電電流は 0.5A で放電終了電圧を 1.0V に設定しました。
また、以前作成した単4電池用のアダプタはきつかったので今回作り直しました。
下図が、今回作成した単4電池用アダプタのCAD画面です。回転したものを切り取っているだけなので設計は簡単ですね。穴の部分に半田付け作業時に貯めていた抵抗のリードを通して電池のマイナス極が電池ホルダのマイナス側に導通するようにします。
| 単4電池用アダプタ(CAD画面) |
|
|
下の写真はかなり前に開発したデジタル式放電器です。右側に映っているのは単4電池を装着するためのアダプタです。
| 以前開発したデジタル式放電器 |
|
|
下の写真は放電中の様子です。スイッチ操作で表示する電池を選択(または全チャンネル表示)が可能です。
| デジタル式放電器(放電中) |
|
|
測定結果を下表に示します。この電池の仕様容量は 1100mAh ですが測定結果は仕様容量の70%弱と言ったところです。
通常は回数を重ねるごとに眠っていた電池が活性化してくるので容量が増えるのですが、今回は3回目の測定値が電池によらず低めになりました。これは充電後に直ぐに測定したためかもしれません。1回目は購入直後に追充電していますし、2回目はすぐに放電できなかったので満充電後に時間を置いてから放電前に追充電しています。
以前測定した百均のニッケル水素電池(VOLCANO)は数回の充放電でほぼ仕様容量になったのでお勧めかもしれません。
|
|
それぞれの電池の放電特性の詳細を下図に示します。
下図は1回目(購入後に直ぐに満充電した状態から放電試験実施)です。
| EBL製単4電池の放電特性(1回目) |
|
|
2回目の放電で原因は不明なのですが No.2 の放電特性が暴れていますね。No.4 も後半に少し暴れています。
| EBL製単4電池の放電特性(2回目) |
|
|
3回目は上記の様に早めに放電してしまいました。電圧特性を見比べると一定値の時間が短い(だらだら下がっている)のでもしかしたら既に劣化が進んでいるのかもしれません。
| EBL製単4電池の放電特性(3回目) |
|
|
★追記 2023/07/20
従来使用していた TOSHIBA 製の4本の白い単4電池の容量も測定してみました。
仕様容量が 750mAh で測定値の平均が 766mAh なので数年前に購入した(使用頻度は高くない)にもかかわらず、仕様値以上の結果でした。流石に日本製ですね。
| 単4 東芝製電池放電容量 |
|
|
放電時の電圧/電流特性が下図になります。購入してから数年経ちますがバラツキも少ないですね。
| 東芝製単4電池の放電特性 |
|
|
[ 前へ ] 連載記事 [ 次へ ]
電動こて先クリーナーの製作(その4)ケース完成 [PIC]
半田ごてのこて先クリーナーを自作中で前回の記事で PIC 搭載の制御回路のプリント基板ができたことを書きましたが、いよいよケースが完成しましたので記録しておきます。
CAD(DesignSpark Mechanical)を使って設計したCAD画面が下図になります。
判り辛いですが背面の扉を開くと回転ブラシの後方に設置した半田屑受け皿の取り出しや電池交換ができるようにしました。扉の固定は機構設計が楽なマグネット方式にしてみました。
完成後に撮影した記念写真も貼っておきます。
下の写真は正面から撮ったものでこて先を入れる部分は耐熱性を高めるために厚手(60um)のアルミホイルで包んでいます。アルミホイルをもう少し丁寧に貼れば金属部品の様に見せることが可能かもしれませんw
右側のスイッチを押すことで待機状態になりスイッチの下の LED が点滅します。こて先を入れると自動的にブラシが回転し、3秒後に停止します。何もしなければ3分後に電源が切れます。待機時には電源(単三電池2本)の電圧もチェックしていて 2.3V 以下や 2.0V 以下になると LED の点灯パターンが変化して知らせるようになっています。1.8V 以下の場合は LED を速いテンポで点滅後、過放電防止のために電源を切るようにしました。
右前面から見ると下の写真のようになります。モーターや制御基板を左側に実装した関係でこて先挿入口が中心よりも右側にあります。
背面は下の写真のようになっています。前述のようにメンテナンス用の扉を設け、今回はマグネットで固定しました。
背面の扉を開けると下の写真のようになり、半田屑受け皿の掃除や電池交換をできるようになっています。
Twitter に投稿した動画付きメッセージも貼っておきます。
★追記 2023/05/02 {
こて先のクリーン前後の写真を撮ったので貼っておきます。
写真では判り辛いですがクリーン後はピッカピカで気持ちが良いですね。百均の小型たわしをブラシにしているのでこて先を摩耗せずに汚れだけが取り除かれて程よい感じです。
}
★追記 2023/05/05 {
説明動画をYouTubeにアップしましたので貼っておきます。
}
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
CAD(DesignSpark Mechanical)を使って設計したCAD画面が下図になります。
判り辛いですが背面の扉を開くと回転ブラシの後方に設置した半田屑受け皿の取り出しや電池交換ができるようにしました。扉の固定は機構設計が楽なマグネット方式にしてみました。
|
|
||||
|
|
完成後に撮影した記念写真も貼っておきます。
下の写真は正面から撮ったものでこて先を入れる部分は耐熱性を高めるために厚手(60um)のアルミホイルで包んでいます。アルミホイルをもう少し丁寧に貼れば金属部品の様に見せることが可能かもしれませんw
右側のスイッチを押すことで待機状態になりスイッチの下の LED が点滅します。こて先を入れると自動的にブラシが回転し、3秒後に停止します。何もしなければ3分後に電源が切れます。待機時には電源(単三電池2本)の電圧もチェックしていて 2.3V 以下や 2.0V 以下になると LED の点灯パターンが変化して知らせるようになっています。1.8V 以下の場合は LED を速いテンポで点滅後、過放電防止のために電源を切るようにしました。
| こて先クリーナー(左前面) |
|
|
右前面から見ると下の写真のようになります。モーターや制御基板を左側に実装した関係でこて先挿入口が中心よりも右側にあります。
| こて先クリーナー(右前面) |
|
|
背面は下の写真のようになっています。前述のようにメンテナンス用の扉を設け、今回はマグネットで固定しました。
| こて先クリーナー(背面) |
|
|
背面の扉を開けると下の写真のようになり、半田屑受け皿の掃除や電池交換をできるようになっています。
| こて先クリーナー(背面2) |
|
|
Twitter に投稿した動画付きメッセージも貼っておきます。
こて先クリーナーのケースが完成しました
— skyriver (@wcinp) April 14, 2023
ほぼ最初のイメージ通りに仕上がりました
電動こて先クリーナーは市販もされていますがブラシだけでも結構なお値段です
今回作成したものは100円で2台分のブラシを収穫できますwhttps://t.co/TwBNrqrT4k#こて先クリーナー #PIC12F683 https://t.co/c0ysc9I4Sd pic.twitter.com/BAkIySA5eY
★追記 2023/05/02 {
こて先のクリーン前後の写真を撮ったので貼っておきます。
写真では判り辛いですがクリーン後はピッカピカで気持ちが良いですね。百均の小型たわしをブラシにしているのでこて先を摩耗せずに汚れだけが取り除かれて程よい感じです。
| クリーン前 | クリーン後 |
|
|
|
★追記 2023/05/05 {
説明動画をYouTubeにアップしましたので貼っておきます。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
電動こて先クリーナーの製作(その3)プリント基板完成 [PIC]
前回の記事で PIC を使った制御回路とプリント基板のパターン設計等について書きました。プリント基板ができましたのでブログに書いて置きたいと思います。
下の写真が完成したプリント基板のトップ面です。PIC(PIC12F683)は表面実装タイプではなくスルホールタイプを実装しています。昇圧用 IC(HT7750A)も手持ちで表面実装タイプもありましたが、PIC に合わせてリード品を実装するようにしました。
下の写真がボトム面です。実装した PIC はスルホールタイプなのでソケットから取り外して書き込みができますが、プリント基板に付けたままでも書き込みできるように PICKIT に接続するための端子用の穴を設けています。
回路が単純なこともあり部品実装後、直ぐに動作しました。
残りはケース設計ですが、ほぼ完成しています(下図)。下図は中身が見えるように外枠のケース本体を非表示にした状態です。
半田ごてのコテ先を入れる部分は耐熱性能を上げるためにアルミ箔で包んでケースの外枠に取付ける予定です。この部分は缶コーヒーのアルミ缶の口の部分の使用や百均で売っている金属製のケースを利用する等、色々考えたのですが、形状の自由度を重視して3Dプリント部品をアルミ箔で包んで使用することにしました。
同様にブラシの後方にあるコテ先から分離された半田を受ける部分もアルミ箔で覆う予定です。
★追記 2023/04/05 {
外枠のケース本体の図を追記しました。背面は扉になっていてブラシの後方にある半田屑の受け皿の取り出しや電池交換ができるようになっています。
}
最後に、ケースの外枠が無い状態ではありますが、動作確認した際の動画を貼り付けた Twitter メッセージを貼っておきます。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
下の写真が完成したプリント基板のトップ面です。PIC(PIC12F683)は表面実装タイプではなくスルホールタイプを実装しています。昇圧用 IC(HT7750A)も手持ちで表面実装タイプもありましたが、PIC に合わせてリード品を実装するようにしました。
| 制御基板(トップ面) |
|
|
下の写真がボトム面です。実装した PIC はスルホールタイプなのでソケットから取り外して書き込みができますが、プリント基板に付けたままでも書き込みできるように PICKIT に接続するための端子用の穴を設けています。
| 制御基板(ボトム面) |
|
|
回路が単純なこともあり部品実装後、直ぐに動作しました。
残りはケース設計ですが、ほぼ完成しています(下図)。下図は中身が見えるように外枠のケース本体を非表示にした状態です。
半田ごてのコテ先を入れる部分は耐熱性能を上げるためにアルミ箔で包んでケースの外枠に取付ける予定です。この部分は缶コーヒーのアルミ缶の口の部分の使用や百均で売っている金属製のケースを利用する等、色々考えたのですが、形状の自由度を重視して3Dプリント部品をアルミ箔で包んで使用することにしました。
同様にブラシの後方にあるコテ先から分離された半田を受ける部分もアルミ箔で覆う予定です。
| 半田ごて先クリーナーの内部構造(CAD画面) |
|
|
★追記 2023/04/05 {
外枠のケース本体の図を追記しました。背面は扉になっていてブラシの後方にある半田屑の受け皿の取り出しや電池交換ができるようになっています。
| 半田ごて先クリーナーの外観(CAD画面) |
|
|
最後に、ケースの外枠が無い状態ではありますが、動作確認した際の動画を貼り付けた Twitter メッセージを貼っておきます。
コテ先クリーナーの制御部のプリント基板化が出来ました
— skyriver (@wcinp) April 5, 2023
まだケースの外枠を付けていませんが動作確認してみた時の動画を添付します(問題無く動作しました)
ケース設計もほぼ完了しました(詳細はブログを参照して下さい)https://t.co/pEocPCCJGR#こて先クリーナー #PIC12F683 #DSMech https://t.co/Xz96wRic0x pic.twitter.com/5nJPiFNPBx
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
電動こて先クリーナーの製作(その2)PICでの制御 [PIC]
今回の回路設計作業の後に判ったことですが、ネットで探してみたら「ぼくのマイコン開発のメモ」と言うブログの「電動コテ先クリーナ FT-720」の記事に白光のコテ作クリーナーを分解した情報が公開されていました。
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
- 電源
ハンディ性を考慮し、単三電池2本で動くようにする。未使用時には極力消費電流を抑えるようにする。
- 動作スイッチ
スイッチを押すことで10分間 wake 状態になる。タイムアップ時には小電力モードに移行する。
- こて先検出時の動作
wake 状態でこて先を検出した際は一定時間(3秒間)ブラシを回転させる。回転中にこて先を検出した場合は3秒タイマーを再設定する。
- ブラシの回転停止条件
上記の3秒タイマがタイムアップした時点でブラシの回転を停止し、上記の wake タイマを再設定する。
- こて先センサ
光学的なセンサを使用する。外来光からの影響を考慮し、手持ちの赤外線リモコン受信モジュール(以降、赤外線受信モジュールと記す)を使用する。
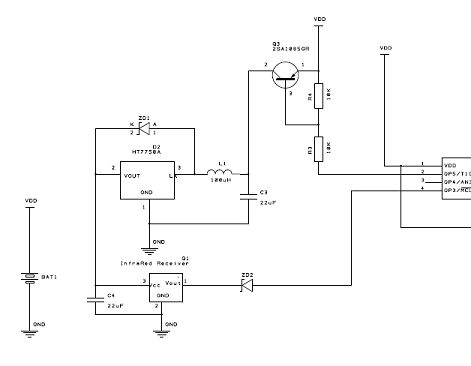
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
| 昇圧と赤外線受信モジュール部分の回路 |
|
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
| 昇圧回路への給電制御部 |
|
|
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
| 赤外線受信モジュールの出力波形例 |
|
|
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
| ブラシ駆動波形(3.3V動作) | ブラシ駆動波形の拡大(3,3V動作) |
|
|
|
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
| ブラシ駆動波形(2.4V動作) | ブラシ駆動波形の拡大(2,4V動作) |
|
|
|
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
| NMOS FET のVgs 特性 |
|
|
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
- 電源電圧 2.4V でモーターが回らない問題対策
FET のゲートを引ききれないので PIC 自体も5Vで動かすことにした。これに伴い、5V 昇圧回路の ON/OFF 制御を廃止した。
- 未使用時の電流低減対策
未使用時は PIC を sleep 状態にしていたが安定化電源での給電で sleep 時にテスタで電流値を測定した結果 12uA 程度であった。安定化電源のマイナス側を外しても電流測定値が 3uA 程度あることが後で判ったので実力値としては 9uA 程度と予測される。
対策として未使用時は PIC からの制御により電源をオフにすることにした。
モーター制御用で使っていた NMOS FET は2個入りパッケージなので未使用だった1個を使って電源制御するように回路を変更した。NMOS なので GND 側をスイッチするようにした。
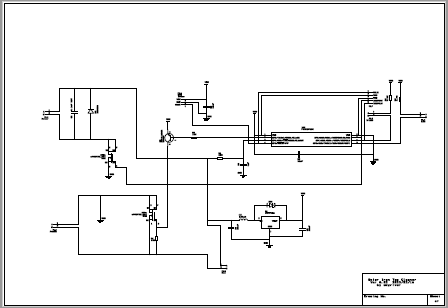
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
| 対策後の回路 |
|
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
| パターン図(グランドベタ化前) |
|
|
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
| グランドベタ化後のパターン図(トップ面) |
|
|
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
| グランドベタ化後のパターン図(ボトム面) |
|
|
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
| 3D表示(トップ面) |
|
|
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
| 3D表示(ボトム面) |
|
|
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
こて先クリーナーの制御部の試作回路とソフトがほぼできました
— skyriver (@wcinp) March 11, 2023
PIC12F683を使用し、未使用時はsleepでは無くPICが電源をオフするようにしました
こて先検出には外来ノイズを受けにくい(と思われる)赤外線リモコン受信モジュールを使用しています#こて先クリーナー #PIC12F683 pic.twitter.com/vjzmcelTwD
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
電動こて先クリーナーの製作(その1) [PIC]
Twitter で半田ごてのこて先クリーナーを見かけ、確かに便利そうだなぁと思い、Amazon で探したところ結構な値段でした。AliExpress(以降、蟻さんと記す) でも探してみましたが安価な物は見つかりませんでした。
そこで久々に動くものでも作ろうかということで自作することにしました。
最初に百均で耐熱性がそれなりにありブラシとして使えそうな素材を探したところ、下の写真の天然たわしを見つけましたw
また、動力源としてモーター内蔵の物を探しましたが、意外に中々ないものですね。おもちゃコーナーでもモーター付きのものはありませんでした。夏であればUSB用扇風機がありそうですが、この時期に見つけられたモーター駆動の百円商品は下の写真のカプチーノミキサーだけでした。
天然ブラシの取っ手からブラシ部分を取り外したものが下の写真です。純正のクリーナーの替えブラシは結構な値段ですが、今回制作予定のものは百円で2台分収穫できますw
最初は動力源としてドローン用の小型モーターを使って実験していましたがパワー不足でした。上記の百均で購入したカプチーノミキサーからモーターを取り出そうとしたところ、手持ちで同じくらいの大きさのモーターが見つかったのでそれで事前実験しています(円形で平らなモーターを蟻さんでも注文しました)
まずは、可動部分の構造の実験として下図のようなものを3Dプリンタで作成しました。
ベアリングは手持ちの物(フィラメントホルダ作成時に購入)を使い、動力伝達用のラバーベルトは蟻さんで購入しました。
ブラシの支え方で少し悩みましたが、ネジ式で幅を調整できるようにしてベアリングに取付けたパーツの溝にブラシの軸を挟むようにしました。
うまく回転させるためにはブラシの回転ブレを少なくする必要があります。試行錯誤した結果、ブラシの軸の針金を整形して微調整するという原始的な方式に落ち着きましたw
Twitter にアップした動画付きメッセージも貼っておきます。
次回は PIC を使った制御について書く予定です。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
| 白光のこて先クリーナー |
|
|
そこで久々に動くものでも作ろうかということで自作することにしました。
最初に百均で耐熱性がそれなりにありブラシとして使えそうな素材を探したところ、下の写真の天然たわしを見つけましたw
| 天然たわし |
|
|
また、動力源としてモーター内蔵の物を探しましたが、意外に中々ないものですね。おもちゃコーナーでもモーター付きのものはありませんでした。夏であればUSB用扇風機がありそうですが、この時期に見つけられたモーター駆動の百円商品は下の写真のカプチーノミキサーだけでした。
| カプチーノミキサー |
|
|
天然ブラシの取っ手からブラシ部分を取り外したものが下の写真です。純正のクリーナーの替えブラシは結構な値段ですが、今回制作予定のものは百円で2台分収穫できますw
| 取り外したブラシ |
|
|
最初は動力源としてドローン用の小型モーターを使って実験していましたがパワー不足でした。上記の百均で購入したカプチーノミキサーからモーターを取り出そうとしたところ、手持ちで同じくらいの大きさのモーターが見つかったのでそれで事前実験しています(円形で平らなモーターを蟻さんでも注文しました)
まずは、可動部分の構造の実験として下図のようなものを3Dプリンタで作成しました。
ベアリングは手持ちの物(フィラメントホルダ作成時に購入)を使い、動力伝達用のラバーベルトは蟻さんで購入しました。
ブラシの支え方で少し悩みましたが、ネジ式で幅を調整できるようにしてベアリングに取付けたパーツの溝にブラシの軸を挟むようにしました。
| ブラシ回転部分の構造 |
|
|
うまく回転させるためにはブラシの回転ブレを少なくする必要があります。試行錯誤した結果、ブラシの軸の針金を整形して微調整するという原始的な方式に落ち着きましたw
Twitter にアップした動画付きメッセージも貼っておきます。
蟻さんで注文したモーターを待ち切れずに手持ちの大きなモーターで実験を継続
— skyriver (@wcinp) February 25, 2023
回転ブレ対策に思いの外苦労したが漸く静音で回転するようになった^^
段々形になってきたので次はPICを使っての制御方法を考えないと・・ pic.twitter.com/G2VKp9ZCSc
次回は PIC を使った制御について書く予定です。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]


)

){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}