電動こて先クリーナーの製作(その2)PICでの制御 [PIC]
今回の回路設計作業の後に判ったことですが、ネットで探してみたら「ぼくのマイコン開発のメモ」と言うブログの「電動コテ先クリーナ FT-720」の記事に白光のコテ作クリーナーを分解した情報が公開されていました。
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
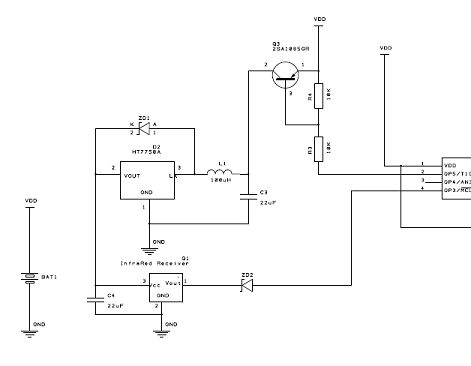
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
- 電源
ハンディ性を考慮し、単三電池2本で動くようにする。未使用時には極力消費電流を抑えるようにする。
- 動作スイッチ
スイッチを押すことで10分間 wake 状態になる。タイムアップ時には小電力モードに移行する。
- こて先検出時の動作
wake 状態でこて先を検出した際は一定時間(3秒間)ブラシを回転させる。回転中にこて先を検出した場合は3秒タイマーを再設定する。
- ブラシの回転停止条件
上記の3秒タイマがタイムアップした時点でブラシの回転を停止し、上記の wake タイマを再設定する。
- こて先センサ
光学的なセンサを使用する。外来光からの影響を考慮し、手持ちの赤外線リモコン受信モジュール(以降、赤外線受信モジュールと記す)を使用する。
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
| 昇圧と赤外線受信モジュール部分の回路 |
|
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
| 昇圧回路への給電制御部 |
|
|
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
| 赤外線受信モジュールの出力波形例 |
|
|
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
| ブラシ駆動波形(3.3V動作) | ブラシ駆動波形の拡大(3,3V動作) |
|
|
|
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
| ブラシ駆動波形(2.4V動作) | ブラシ駆動波形の拡大(2,4V動作) |
|
|
|
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
| NMOS FET のVgs 特性 |
|
|
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
- 電源電圧 2.4V でモーターが回らない問題対策
FET のゲートを引ききれないので PIC 自体も5Vで動かすことにした。これに伴い、5V 昇圧回路の ON/OFF 制御を廃止した。
- 未使用時の電流低減対策
未使用時は PIC を sleep 状態にしていたが安定化電源での給電で sleep 時にテスタで電流値を測定した結果 12uA 程度であった。安定化電源のマイナス側を外しても電流測定値が 3uA 程度あることが後で判ったので実力値としては 9uA 程度と予測される。
対策として未使用時は PIC からの制御により電源をオフにすることにした。
モーター制御用で使っていた NMOS FET は2個入りパッケージなので未使用だった1個を使って電源制御するように回路を変更した。NMOS なので GND 側をスイッチするようにした。
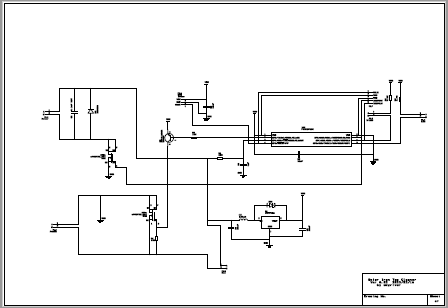
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
| 対策後の回路 |
|
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
| パターン図(グランドベタ化前) |
|
|
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
| グランドベタ化後のパターン図(トップ面) |
|
|
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
| グランドベタ化後のパターン図(ボトム面) |
|
|
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
| 3D表示(トップ面) |
|
|
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
| 3D表示(ボトム面) |
|
|
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
こて先クリーナーの制御部の試作回路とソフトがほぼできました
— skyriver (@wcinp) March 11, 2023
PIC12F683を使用し、未使用時はsleepでは無くPICが電源をオフするようにしました
こて先検出には外来ノイズを受けにくい(と思われる)赤外線リモコン受信モジュールを使用しています#こて先クリーナー #PIC12F683 pic.twitter.com/vjzmcelTwD
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]


)

){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
コメント 0