CP/M用hexローダーの製作 [Z80]
CP/M-80 用のプログラムをアセンブリ言語で書く場合、パソコン上のエディタを使ってソースを編集したいものです。従来は、パソコンで編集したアセンブラソースを Z80 ボードに XMODEM で転送して動かしていました。
しかし、パソコン上で CP/M エミュレータを使ってアセンブル&リンクして作成した HEX ファイルを TeraTerm 上にドラッグ&ドロップして実行できたらより効率的です。
そこで CP/M 上で動作する HEX ローダーを作成してみました。このローダーの機能(特徴)は下記の通りです。
CP/M 側でこのローダーを起動後に、普通に作成した HEX ファイルを TeraTerm にドラッグ&ドロップすればロード後に自動的に実行されるので転送作業がかなり楽になりました。
下記のリンクに公開しました。商用利用以外であれば自由に使用可能とします。
[history]
2023/05/15 Ver 0.03 set 00h to 0080H by skyriver
2023/03/26 Ver 0.02 can break by ^C
2023/03/26 Ver 0.01 published
ソースも貼っておきます。
しかし、パソコン上で CP/M エミュレータを使ってアセンブル&リンクして作成した HEX ファイルを TeraTerm 上にドラッグ&ドロップして実行できたらより効率的です。
そこで CP/M 上で動作する HEX ローダーを作成してみました。このローダーの機能(特徴)は下記の通りです。
- コンソールから入力されるインテル HEX 形式のデータをメモリ上に展開します
- ロード完了後にHEX ファイルの先頭行のアドレスにジャンプします(ロードプログラムが自動起動します)
- CP/M の標準プログラムである 0100H から始まるものもダウンロードできるようにするために自身のコードを 0080H に移動してから実行します
- 高速化のために BIOS の機能を直にコールしています
CP/M 側でこのローダーを起動後に、普通に作成した HEX ファイルを TeraTerm にドラッグ&ドロップすればロード後に自動的に実行されるので転送作業がかなり楽になりました。
下記のリンクに公開しました。商用利用以外であれば自由に使用可能とします。
[history]
2023/05/15 Ver 0.03 set 00h to 0080H by skyriver
2023/03/26 Ver 0.02 can break by ^C
2023/03/26 Ver 0.01 published
ソースも貼っておきます。
| CP/M-80 用 HEX ローダー(アセンブラ) |
|
Z80エクステンダの製作 [Z80]
Z80関連で実機でちょっと実験したい場合に手軽に動かせる環境があると便利です。
しかし、今まで作成したZ80ボードはバスや信号線をコネクタで出していないのでハードウェアの実験には使い辛いものになっています。
「超小型Z80マイコン(その12)PCBへの部品実装」の記事で書いた下図の下駄が思いの外便利だったので、この考え方を踏襲した実験用の下駄(エクステンダ)を作成してみようと思います。
実験ではプログラマブルなディバイスがあった方が便利なので GAL22V10 も実装することにします。
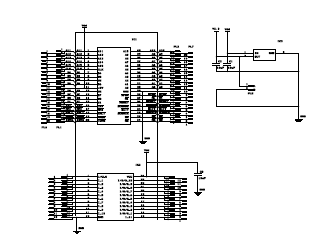
回路は下図のように至って簡単なものでグランドのベタ化は行わず、電源のトラックを切断すれば他の 40 ピンCPUでも流用し易い様にしました。
パターン図が下図で、これ以上無いほど単純なものになっています。
トップ面の3D表示が下図です。Z80に重なっているピンコネクタは実際にはZ80の右隣のピンコネクタと共にボトム面に細ピンヘッダを付けて既存のZ80ボードのCPUソケットに差し込みます。
各ICの一つのピンに付きピンコネクタが2個あるので、ブレッドボードの様にジャンパー線で信号を繋ぐことができます。実験に必要な追加部品はブレッドボードに付けで本ボードと接続するか、孫基板に必要部品を実装して本エクステンダのピンヘッダに接続します。
ロジアナでの信号確認も容易なので結構便利なものになるのではないかと思います。
下図はボトム面の3D表示です。前述のようにボトム面にはZ80のソケットに刺さるように細ピンヘッダを付けます。また、実験で使うであろう3.3Vを生成するレギュレータもボトム面に実装しました。
しかし、今まで作成したZ80ボードはバスや信号線をコネクタで出していないのでハードウェアの実験には使い辛いものになっています。
「超小型Z80マイコン(その12)PCBへの部品実装」の記事で書いた下図の下駄が思いの外便利だったので、この考え方を踏襲した実験用の下駄(エクステンダ)を作成してみようと思います。
| Z80 信号測定用の下駄 |
|
|
実験ではプログラマブルなディバイスがあった方が便利なので GAL22V10 も実装することにします。
回路は下図のように至って簡単なものでグランドのベタ化は行わず、電源のトラックを切断すれば他の 40 ピンCPUでも流用し易い様にしました。
| Z80 エクステンダの回路図 |
|
パターン図が下図で、これ以上無いほど単純なものになっています。
| Z80 エクステンダパターン図 |
|
|
トップ面の3D表示が下図です。Z80に重なっているピンコネクタは実際にはZ80の右隣のピンコネクタと共にボトム面に細ピンヘッダを付けて既存のZ80ボードのCPUソケットに差し込みます。
各ICの一つのピンに付きピンコネクタが2個あるので、ブレッドボードの様にジャンパー線で信号を繋ぐことができます。実験に必要な追加部品はブレッドボードに付けで本ボードと接続するか、孫基板に必要部品を実装して本エクステンダのピンヘッダに接続します。
ロジアナでの信号確認も容易なので結構便利なものになるのではないかと思います。
| Z80 エクステンダ3D表示(トップ面) |
|
|
下図はボトム面の3D表示です。前述のようにボトム面にはZ80のソケットに刺さるように細ピンヘッダを付けます。また、実験で使うであろう3.3Vを生成するレギュレータもボトム面に実装しました。
| Z80 エクステンダ3D表示(ボトム面) |
|
|
電動こて先クリーナーの製作(その2)PICでの制御 [PIC]
今回の回路設計作業の後に判ったことですが、ネットで探してみたら「ぼくのマイコン開発のメモ」と言うブログの「電動コテ先クリーナ FT-720」の記事に白光のコテ作クリーナーを分解した情報が公開されていました。
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
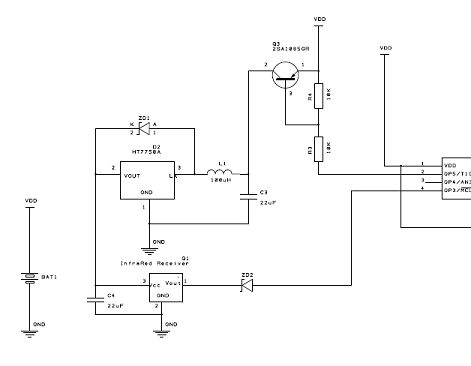
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
これを見ると白光のこて先クリーナーはマイコンを使用せずに光センサーの出力で直にモーターの ON/OFF を制御しているようです。常にLEDが発光しているのでそれなりに消費電流はあるでしょうが外部電源と言うことなので割り切っているみたいです。
今、開発中のこて先クリーナーは手持ちの PIC(PIC12F683)使って制御してみたいと思います。以降、作業記録の意味合いも込めて実施した作業内容を時系列で記録していますので、内容としてはあまり面白くないかもしれないことを事前にお断りしておきます。
始めに仕様について簡単に検討してみました。
[仕様概要]
- 電源
ハンディ性を考慮し、単三電池2本で動くようにする。未使用時には極力消費電流を抑えるようにする。
- 動作スイッチ
スイッチを押すことで10分間 wake 状態になる。タイムアップ時には小電力モードに移行する。
- こて先検出時の動作
wake 状態でこて先を検出した際は一定時間(3秒間)ブラシを回転させる。回転中にこて先を検出した場合は3秒タイマーを再設定する。
- ブラシの回転停止条件
上記の3秒タイマがタイムアップした時点でブラシの回転を停止し、上記の wake タイマを再設定する。
- こて先センサ
光学的なセンサを使用する。外来光からの影響を考慮し、手持ちの赤外線リモコン受信モジュール(以降、赤外線受信モジュールと記す)を使用する。
最初に考えた回路は電源の電池2本からの3V(ニッケル水素電池なら2.4V)で PIC を動かし、5V動作が必須な赤外線受信モジュールのみ5Vで動かす方式にしました。
昇圧部と赤外線受信モジュール部の回路が下図になります(クリックで回路全体が見えます)。
| 昇圧と赤外線受信モジュール部分の回路 |
|
最初は省電力化のためにこて先検出する時のみ5Vの昇圧回路(HT7750 使用)を動かすようにしていましたが、後述する問題があったため、最終的には PIC を含めた全体を5V駆動するように変更しています。
下図は昇圧回路への3V給電をスイッチ制御するトランジスタ回路部分をシミュレータで確認した際のキャプチャです。結果としては問題無く制御できそうです。
| 昇圧回路への給電制御部 |
|
|
下図はソフトで生成した 38KHz の矩形波(黄色※1)で赤外線 LED を駆動した際の赤外線受信モジュールの出力信号(紫色)です。出力信号には 200us 程度のディレーがあるので、38KHYz の矩形波は 16 波(421us)出力するようにしました。矩形波出力完了後に赤外線受信モジュールの出力信号をチェックするようにしています。
※1 3.3V 駆動ですが、波形を保存していなかったのでPICが5V動作時の波形を使っています)
| 赤外線受信モジュールの出力波形例 |
|
|
下図は 3,3V で動かしている時にこて先を検出し、ブラシの回転モーターをオンした際の波形です。黄色がモーターのマイナス側(=スイッチしているNMOS FETのドレイン側)の電圧で、紫色が赤外線 LED の駆動波形です。右側は拡大したものです。
| ブラシ駆動波形(3.3V動作) | ブラシ駆動波形の拡大(3,3V動作) |
|
|
|
電源電圧を 3.3V から 2.4V に変更してみると予想していたことではありますが、FET のゲート電圧が足りず、モーターをオンしている時でも FET の抵抗が大きくなり、ドレイン電圧が高くなりモーターが回転しない状態になってしまいました。
| ブラシ駆動波形(2.4V動作) | ブラシ駆動波形の拡大(2,4V動作) |
|
|
|
今回使用している NMOS FET は手持ちの8ピンの SOP パッケージで2個入りの uPA2753GR でオン抵抗が小さいことから購入したものです。データシートを確認したところやはり4V以上で使用するのが良さそうですね。
| NMOS FET のVgs 特性 |
|
|
また、sleep 時の電流も想定より大きかったので下記の見直しを行いました。
- 電源電圧 2.4V でモーターが回らない問題対策
FET のゲートを引ききれないので PIC 自体も5Vで動かすことにした。これに伴い、5V 昇圧回路の ON/OFF 制御を廃止した。
- 未使用時の電流低減対策
未使用時は PIC を sleep 状態にしていたが安定化電源での給電で sleep 時にテスタで電流値を測定した結果 12uA 程度であった。安定化電源のマイナス側を外しても電流測定値が 3uA 程度あることが後で判ったので実力値としては 9uA 程度と予測される。
対策として未使用時は PIC からの制御により電源をオフにすることにした。
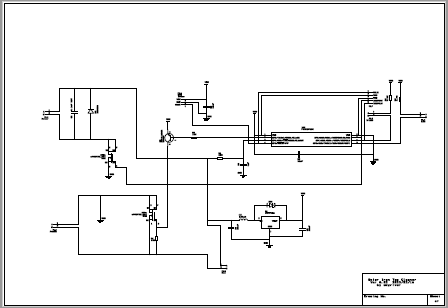
モーター制御用で使っていた NMOS FET は2個入りパッケージなので未使用だった1個を使って電源制御するように回路を変更した。NMOS なので GND 側をスイッチするようにした。
上記の対策後の回路図が下図になります。中央下側の PL5 Bat に単三電池2本を接続します( A がプラス側)。
| 対策後の回路 |
|
未使用時の電流値はテスタ(uAレンジ)では測定不可能なほど小さくなりました。ブレッドボード上での動作も問題無かったのでパターン設計を行いました。緑色部分はグランドです。
| パターン図(グランドベタ化前) |
|
|
グランドベタ化後のトップ面のパターンが下図になります。PIC はリードパッケージの物を使いました。コネクタはサイド型を使用する予定なので基板の淵からのスペースを確保し、説明のシルク印刷文字はコネクタの後方に書いています。
| グランドベタ化後のパターン図(トップ面) |
|
|
下図がボトム面のパターンです。SMD 部品をボトム面に配置しました。
| グランドベタ化後のパターン図(ボトム面) |
|
|
トップ面の3D表示が下図になります。右上のセラコンは何故か立方体になっています。
| 3D表示(トップ面) |
|
|
下図がボトム面の3D表示です。中央上部の茶色の立方体は PIC 書込み用のスルホールで部品は実装しません。PIC はリード品を使用するのでソケットから外して直に書き込むこともできます。
| 3D表示(ボトム面) |
|
|
最後に Twitter にアップしたモーター変更後の物を制御している様子を録画した動画付きメッセージを貼っておきます。
こて先クリーナーの制御部の試作回路とソフトがほぼできました
— skyriver (@wcinp) March 11, 2023
PIC12F683を使用し、未使用時はsleepでは無くPICが電源をオフするようにしました
こて先検出には外来ノイズを受けにくい(と思われる)赤外線リモコン受信モジュールを使用しています#こて先クリーナー #PIC12F683 pic.twitter.com/vjzmcelTwD
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
電動こて先クリーナーの製作(その1) [PIC]
Twitter で半田ごてのこて先クリーナーを見かけ、確かに便利そうだなぁと思い、Amazon で探したところ結構な値段でした。AliExpress(以降、蟻さんと記す) でも探してみましたが安価な物は見つかりませんでした。
そこで久々に動くものでも作ろうかということで自作することにしました。
最初に百均で耐熱性がそれなりにありブラシとして使えそうな素材を探したところ、下の写真の天然たわしを見つけましたw
また、動力源としてモーター内蔵の物を探しましたが、意外に中々ないものですね。おもちゃコーナーでもモーター付きのものはありませんでした。夏であればUSB用扇風機がありそうですが、この時期に見つけられたモーター駆動の百円商品は下の写真のカプチーノミキサーだけでした。
天然ブラシの取っ手からブラシ部分を取り外したものが下の写真です。純正のクリーナーの替えブラシは結構な値段ですが、今回制作予定のものは百円で2台分収穫できますw
最初は動力源としてドローン用の小型モーターを使って実験していましたがパワー不足でした。上記の百均で購入したカプチーノミキサーからモーターを取り出そうとしたところ、手持ちで同じくらいの大きさのモーターが見つかったのでそれで事前実験しています(円形で平らなモーターを蟻さんでも注文しました)
まずは、可動部分の構造の実験として下図のようなものを3Dプリンタで作成しました。
ベアリングは手持ちの物(フィラメントホルダ作成時に購入)を使い、動力伝達用のラバーベルトは蟻さんで購入しました。
ブラシの支え方で少し悩みましたが、ネジ式で幅を調整できるようにしてベアリングに取付けたパーツの溝にブラシの軸を挟むようにしました。
うまく回転させるためにはブラシの回転ブレを少なくする必要があります。試行錯誤した結果、ブラシの軸の針金を整形して微調整するという原始的な方式に落ち着きましたw
Twitter にアップした動画付きメッセージも貼っておきます。
次回は PIC を使った制御について書く予定です。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]
| 白光のこて先クリーナー |
|
|
そこで久々に動くものでも作ろうかということで自作することにしました。
最初に百均で耐熱性がそれなりにありブラシとして使えそうな素材を探したところ、下の写真の天然たわしを見つけましたw
| 天然たわし |
|
|
また、動力源としてモーター内蔵の物を探しましたが、意外に中々ないものですね。おもちゃコーナーでもモーター付きのものはありませんでした。夏であればUSB用扇風機がありそうですが、この時期に見つけられたモーター駆動の百円商品は下の写真のカプチーノミキサーだけでした。
| カプチーノミキサー |
|
|
天然ブラシの取っ手からブラシ部分を取り外したものが下の写真です。純正のクリーナーの替えブラシは結構な値段ですが、今回制作予定のものは百円で2台分収穫できますw
| 取り外したブラシ |
|
|
最初は動力源としてドローン用の小型モーターを使って実験していましたがパワー不足でした。上記の百均で購入したカプチーノミキサーからモーターを取り出そうとしたところ、手持ちで同じくらいの大きさのモーターが見つかったのでそれで事前実験しています(円形で平らなモーターを蟻さんでも注文しました)
まずは、可動部分の構造の実験として下図のようなものを3Dプリンタで作成しました。
ベアリングは手持ちの物(フィラメントホルダ作成時に購入)を使い、動力伝達用のラバーベルトは蟻さんで購入しました。
ブラシの支え方で少し悩みましたが、ネジ式で幅を調整できるようにしてベアリングに取付けたパーツの溝にブラシの軸を挟むようにしました。
| ブラシ回転部分の構造 |
|
|
うまく回転させるためにはブラシの回転ブレを少なくする必要があります。試行錯誤した結果、ブラシの軸の針金を整形して微調整するという原始的な方式に落ち着きましたw
Twitter にアップした動画付きメッセージも貼っておきます。
蟻さんで注文したモーターを待ち切れずに手持ちの大きなモーターで実験を継続
— skyriver (@wcinp) February 25, 2023
回転ブレ対策に思いの外苦労したが漸く静音で回転するようになった^^
段々形になってきたので次はPICを使っての制御方法を考えないと・・ pic.twitter.com/G2VKp9ZCSc
次回は PIC を使った制御について書く予定です。
[TOP] [ 前へ ] 連載記事一覧 [ 次へ ]


)

){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}