エクストルーダーの交換検討 [3D_printer]
「デルタ式3Dプリンタ(Kossel Reprap)の購入」の記事で書いた3Dプリンタキットはその後、非常に調子がいいです。
しかし、エクストルーダーのテフロンチューブ取付用カップラーのインサータ受け部に亀裂が入り瞬間接着剤で補修している状態です。
また、TPUフィラメントに対応するために写真中央のグレーの部品を付けてフィラメントが横道にそれないように対処しています。
下の写真はTPUフィラメントを装着しているもので上記の対処により、TPUフィラメントでも造形が可能になっています。
今回はAliExpressでDual GearタイプでTPUも大丈夫そうなエクストルーダーを見つけたので交換する試みについて書いてみます。
届いたパーツが下の写真で固定用のプレートは購入せず、3Dプリンタで作成します。
固定用プレートのCAD設計結果が左図でスライス結果が右図です。
プレートをABSフィラメントで出力したものが下の写真です。
また、フィラメントの湿気対策として将来的にはフィラメントをケースで囲いテフロンチューブを通してエクストルーダーまで持ってきたいので挿入口にネジを切り、テフロンチューブ取付け用カップラーを付けられるようにしました。
(常設していたABS樹脂は梅雨の時期であることもありかなり湿気を吸収している状態です^^;;)
材質はアルミなのでネジ切りは楽です。切削オイルを付けてネジを切ります。
3Dプリンタに取付けた状態が下の写真です。
ここまでは特に問題もなく作業が進んだのですが、新エクストルーダーでフィラメントをロードしてみるとホットエンドに到達した以降、定期的に空回りする問題が発生しましたorz
ドライブギア(フィラメントを送り出すギア)の直径を確認したところ、従来のものは6.50mmで今回購入したものは7.30mmでした。
見た目は同じような大きさでしたがドライブギアの直径が大きくなったことによりフィラメントの送り出し量が多くなり定期的に詰まっていたのが原因のようです。
マニュアル操作でフィラメントを100mm送ったところ、新エクストルーダーではフィラメントが112mm送られる状態でした^^;;
ネットで確認したところ、M92コマンドで現状のパラメータ値を取得し、同コマンドで4つ目のパラメータの数値を変更後、M500コマンドでフラッシュメモリにセーブすればいいようです。
しかし、marlinのバージョンが古いためか、M92コマンドに応答がありません。^^;
M503コマンドで現在の設定値を一覧表示可能なようですが、このコマンドにも反応しませんorz
キット組立時に使用したMarlinのソースが一式あるのでConfiguration.hをざっと見たところ、エクストルーダーの送り量に関係するようなパラメータは見つかりませんでした^^;;;
下記はConfiguration.hからの抜粋ですがM500番台のコマンドは502までの実装のようです。
この3Dプリンタを購入したのが2017年1月で約3年半前ですが、3Dプリンタ関連のソフトの進化はかなり速いので今の情報からの対応はできないようです^^;;
Configuration_adv.hの中にエクストルーダーの送り量に関する定義部分を見つけましたが、元々defineされていない部分なので有効化して変更するのはリスクが大きい・・・
どこかにこのキットに対応する設定があるはずなのでもう少し調べてみます・・・・
今のエクストルーダーでも特に問題はないので元に戻すかもw
★2020/07/29 追記 {
「デルタ式3Dプリンタの静音化」の記事で書いたようにMarlinを V1.1.9.1にVerUpした際、Configraion.h を一通り確認しました。
エクストルーダーのステップレートは DEFAULT_AXIS_STEPS_PER_UNIT の#define部分の第四パラメータです(現在値は160)
現在、エクストルーダーを元に戻して運用しています。
}
★2020/07/29 追記2 {
新エクスローダーに変更しました。
前回問題だったフィラメント送出量の問題については以下のように対処しました。
M503 コマンドで表示される M92 のパラメータは上記の追記で書いたようにソースで設定された
M92 X100.00 Y100.00 Z100.00 E160.00
でした。フィラメントを100mm 注入すると 112mm 入ったので
160 * 100 / 112 = 142.857
の計算値から
M92 X100.00 Y100.00 Z100.00 E142.86
のコマンドでパラメータを変更し、 M500 コマンドでEEPROMに保存しました。
再度、フィラメントを100mm挿入し、実際のフィラメント長を計測した結果、100mmでした。
その後、簡単な造形を行い問題ないことを確認しました。
Configuration.hの該当部分を変更し、コントローラにダウンロードし、今回のエクストルーダーの交換作業が完了しました。
アルミ製のデュアルギア方式のエクストルーダーなので今までのものより性能及び外観が良くなった^^
}
★2020/08/05 追記
「フィラメントの湿気対策(その2)」の記事に本エクストルーダーを使ったフィラメントの湿気対策について記載しました。
しかし、エクストルーダーのテフロンチューブ取付用カップラーのインサータ受け部に亀裂が入り瞬間接着剤で補修している状態です。
また、TPUフィラメントに対応するために写真中央のグレーの部品を付けてフィラメントが横道にそれないように対処しています。
| 従来のエクストルーダー |
|
|
下の写真はTPUフィラメントを装着しているもので上記の対処により、TPUフィラメントでも造形が可能になっています。
| TPUフィラメントのエクストルード |
|
|
今回はAliExpressでDual GearタイプでTPUも大丈夫そうなエクストルーダーを見つけたので交換する試みについて書いてみます。
| Dual Gear Extruder |
|
|
届いたパーツが下の写真で固定用のプレートは購入せず、3Dプリンタで作成します。
| Dual Gear Extruder Parts |
|
|
固定用プレートのCAD設計結果が左図でスライス結果が右図です。
| プレートのCAD画面 | スライス結果 |
|
|
|
プレートをABSフィラメントで出力したものが下の写真です。
| 固定用プレート出力結果 |
|
|
また、フィラメントの湿気対策として将来的にはフィラメントをケースで囲いテフロンチューブを通してエクストルーダーまで持ってきたいので挿入口にネジを切り、テフロンチューブ取付け用カップラーを付けられるようにしました。
(常設していたABS樹脂は梅雨の時期であることもありかなり湿気を吸収している状態です^^;;)
| フィラメントホールの拡張 |
|
|
材質はアルミなのでネジ切りは楽です。切削オイルを付けてネジを切ります。
| ネジ切り |
|
|
3Dプリンタに取付けた状態が下の写真です。
| 新エクストルーダーの取付状態 |
|
|
ここまでは特に問題もなく作業が進んだのですが、新エクストルーダーでフィラメントをロードしてみるとホットエンドに到達した以降、定期的に空回りする問題が発生しましたorz
ドライブギア(フィラメントを送り出すギア)の直径を確認したところ、従来のものは6.50mmで今回購入したものは7.30mmでした。
見た目は同じような大きさでしたがドライブギアの直径が大きくなったことによりフィラメントの送り出し量が多くなり定期的に詰まっていたのが原因のようです。
マニュアル操作でフィラメントを100mm送ったところ、新エクストルーダーではフィラメントが112mm送られる状態でした^^;;
ネットで確認したところ、M92コマンドで現状のパラメータ値を取得し、同コマンドで4つ目のパラメータの数値を変更後、M500コマンドでフラッシュメモリにセーブすればいいようです。
しかし、marlinのバージョンが古いためか、M92コマンドに応答がありません。^^;
M503コマンドで現在の設定値を一覧表示可能なようですが、このコマンドにも反応しませんorz
キット組立時に使用したMarlinのソースが一式あるのでConfiguration.hをざっと見たところ、エクストルーダーの送り量に関係するようなパラメータは見つかりませんでした^^;;;
下記はConfiguration.hからの抜粋ですがM500番台のコマンドは502までの実装のようです。
この3Dプリンタを購入したのが2017年1月で約3年半前ですが、3Dプリンタ関連のソフトの進化はかなり速いので今の情報からの対応はできないようです^^;;
| Marlin の Configuration.h(抜粋) |
|
Configuration_adv.hの中にエクストルーダーの送り量に関する定義部分を見つけましたが、元々defineされていない部分なので有効化して変更するのはリスクが大きい・・・
| Marlin の Configuration_adv.h(抜粋) |
|
どこかにこのキットに対応する設定があるはずなのでもう少し調べてみます・・・・
今のエクストルーダーでも特に問題はないので元に戻すかもw
★2020/07/29 追記 {
「デルタ式3Dプリンタの静音化」の記事で書いたようにMarlinを V1.1.9.1にVerUpした際、Configraion.h を一通り確認しました。
エクストルーダーのステップレートは DEFAULT_AXIS_STEPS_PER_UNIT の#define部分の第四パラメータです(現在値は160)
現在、エクストルーダーを元に戻して運用しています。
| Configraion.h 内のエクストルーダー送出量定義部分 |
|
}
★2020/07/29 追記2 {
新エクスローダーに変更しました。
前回問題だったフィラメント送出量の問題については以下のように対処しました。
M503 コマンドで表示される M92 のパラメータは上記の追記で書いたようにソースで設定された
M92 X100.00 Y100.00 Z100.00 E160.00
でした。フィラメントを100mm 注入すると 112mm 入ったので
160 * 100 / 112 = 142.857
の計算値から
M92 X100.00 Y100.00 Z100.00 E142.86
のコマンドでパラメータを変更し、 M500 コマンドでEEPROMに保存しました。
再度、フィラメントを100mm挿入し、実際のフィラメント長を計測した結果、100mmでした。
その後、簡単な造形を行い問題ないことを確認しました。
Configuration.hの該当部分を変更し、コントローラにダウンロードし、今回のエクストルーダーの交換作業が完了しました。
アルミ製のデュアルギア方式のエクストルーダーなので今までのものより性能及び外観が良くなった^^
}
★2020/08/05 追記
「フィラメントの湿気対策(その2)」の記事に本エクストルーダーを使ったフィラメントの湿気対策について記載しました。
SuperSimpleController [OriginalCPU]
標準ロジックICなどを使ってオリジナルCPUを検討してみました。
FPGAなどで作った方が容易そうですが、限られた環境の中で考えてみるのが楽しそうだったからです。
(結構特殊なロジックICを使ったりするので海外手配の場合、時間がかかって進捗がイマイチです^^;)
フェッチしたインストラクションの値からROMで実装したルックアップテーブルでコントロール信号を生成する予定で、この部分はCISCプロセッサのマイクロコードに対応します。言い換えれば機械語の処理を実現するために記述するメタ言語的なものになります。
今後の検討で変更する可能性もありますが下図のような構成を考えています。
まずはマイクロコードの実行部分の実験としてjump命令と制御信号出力のみの機能を搭載した簡易版のコントローラを作ってみました。
今回は制御信号出力でLCDへの表示も行ってみました。最終的には制御信号出力によりCPU内のリソース制御を行うことでオリジナルCPUにする予定です。
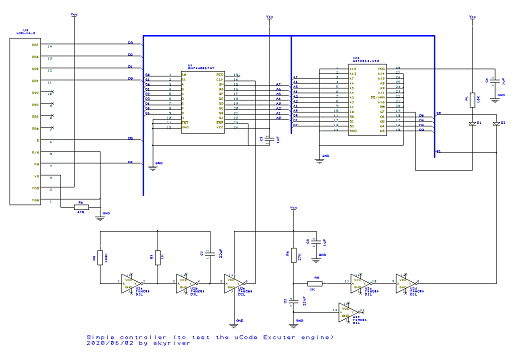
回路は下図のとおりで74AS867、74HC04、W27C512の3チップ構成で非常にシンプルな構成です。
目視で動きが判るようにクロックを遅く設定していますが、数MHzでの動作も可能なのでこれだけでも何かの固定的な制御に使えそうですね。
制御信号のMSB(D7)がlowの時にアドレスがD0..D6の値に設定されるようにすることでjump命令を実装しています。
最初に下記の簡単なパターンをROMに書込み動作確認してみました。
0008Hアドレスの00Hで先頭にjumpします。
実際に動かしてみた時の波形が下図です。想定通り00Hでアドレスがクリされて先頭に戻っています。
次にLCDを接続して文字を表示してみることにします。
バイナリデータを直書きしてもいいのですが可読性を向上させるためにマクロアセンブラのマクロ機能を利用し、HEXファイルを生成しています。
LCDの制御に関しては「PIC24FJの出力コンペアモジュールとLCD3V駆動の実験」の記事で書いた処理をマイクロコードに書き換えています。
電源オン直後の波形が下図です。信号名のカッコ内はLCD側の信号名称です。
YouTubeに動作サンプルをアップしましたので貼っておきます。
赤LEDがアドレスで緑LEDがデータです(上記の回路図にはLED部分は含まれていません)
https://www.youtube.com/watch?v=EuEsv856V10
[TOP] [ 前へ ] 連載記事 [ 次へ ]
FPGAなどで作った方が容易そうですが、限られた環境の中で考えてみるのが楽しそうだったからです。
(結構特殊なロジックICを使ったりするので海外手配の場合、時間がかかって進捗がイマイチです^^;)
フェッチしたインストラクションの値からROMで実装したルックアップテーブルでコントロール信号を生成する予定で、この部分はCISCプロセッサのマイクロコードに対応します。言い換えれば機械語の処理を実現するために記述するメタ言語的なものになります。
今後の検討で変更する可能性もありますが下図のような構成を考えています。
| オリジナルCPU概要ブロック図 |
|
|
まずはマイクロコードの実行部分の実験としてjump命令と制御信号出力のみの機能を搭載した簡易版のコントローラを作ってみました。
今回は制御信号出力でLCDへの表示も行ってみました。最終的には制御信号出力によりCPU内のリソース制御を行うことでオリジナルCPUにする予定です。
回路は下図のとおりで74AS867、74HC04、W27C512の3チップ構成で非常にシンプルな構成です。
| 超シンプルなコントローラー |
|
目視で動きが判るようにクロックを遅く設定していますが、数MHzでの動作も可能なのでこれだけでも何かの固定的な制御に使えそうですね。
制御信号のMSB(D7)がlowの時にアドレスがD0..D6の値に設定されるようにすることでjump命令を実装しています。
最初に下記の簡単なパターンをROMに書込み動作確認してみました。
0008Hアドレスの00Hで先頭にjumpします。
| テストデータ |
|
|
実際に動かしてみた時の波形が下図です。想定通り00Hでアドレスがクリされて先頭に戻っています。
| テストデータ実行時の波形 |
|
|
次にLCDを接続して文字を表示してみることにします。
バイナリデータを直書きしてもいいのですが可読性を向上させるためにマクロアセンブラのマクロ機能を利用し、HEXファイルを生成しています。
LCDの制御に関しては「PIC24FJの出力コンペアモジュールとLCD3V駆動の実験」の記事で書いた処理をマイクロコードに書き換えています。
| LCD制御用マイクロコード |
|
電源オン直後の波形が下図です。信号名のカッコ内はLCD側の信号名称です。
| LCD制御での電源ON直後の波形 |
|
|
YouTubeに動作サンプルをアップしましたので貼っておきます。
赤LEDがアドレスで緑LEDがデータです(上記の回路図にはLED部分は含まれていません)
https://www.youtube.com/watch?v=EuEsv856V10
[TOP] [ 前へ ] 連載記事 [ 次へ ]


)

){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}